Everdrone completes first autonomous drone delivery between hospitals in sweden
Press release 15.07.2019

Deliveries in urban environments is by many considered to be the holy grail of the drone industry. Swedish software and drone service developer, Everdrone, just completed their first fully autonomous deliveries between two hospitals in central Gothenburg. The flight stretched 4,4 km and was made possible through a first-of-its-kind permit given out by the Swedish Transport Agency. The flight was also unique in the sense that the landing was performed in a GPS denied location between tall buildings and only made possible by Everdrone’s onboard sensor system.
Each year about 7400 transportations are carried out between the three major hospitals in Sweden’s second-largest city, Gothenburg. A large majority of the goods are lightweight with a high value, such as blood bags or laboratory samples. In many situations, time is of the essence for this type of deliveries and during rush hours there is a large risk of traffics jams causing significant delays in the transportation chain.
By collaborating with the Innovation Platform – a department bridging the healthcare, academia and the Life Science industry – Everdrone is researching the possibility of using drones as a mean of transportation between hospitals in the Gothenburg area. “A major step forward in turning the concept into reality was taken last week when we successfully performed a number of fully autonomous drone flights in fully realistic environments”, Mats Sällström, CEO of Everdrone, says. Those flights were performed between Sahlgrenska Hospital and Mölndal Hospital.


“The primary purpose with this project is to evaluate the possibility of time savings, but we also see opportunities when it comes to making transportations more environmentally friendly and also reducing costs“, says Magnus Kristiansson, project manager at the Innovation Platform at Region Västra Götaland. “We are constantly working to improve the healthcare services in the region and one way of doing this is to evaluate new technologies“.
“We see great potential in using autonomous drones in the healthcare sector, but in order to make the concept a reality we must show that the technology works in real life, and that it is safe! This type of demonstration proves that both technology and regulations have matured to a degree that we can now carry out fully realistic flights in an urban environment“, Mats added.


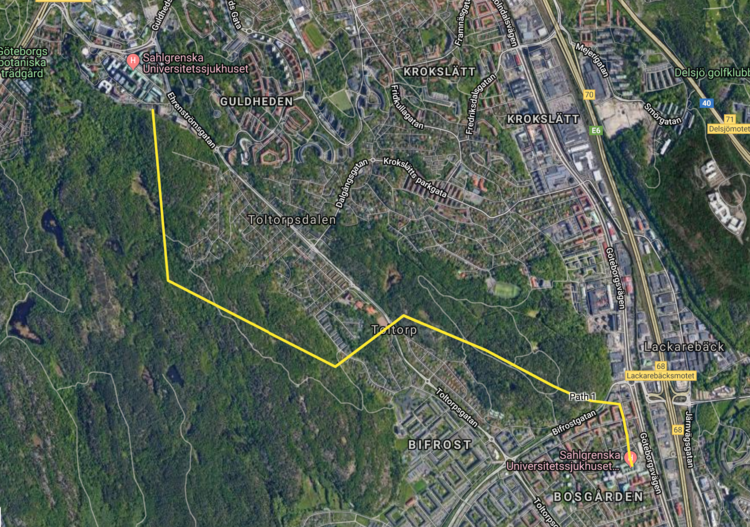
The total flight path in question is 4,4 km (2,73 miles) of which 80% stretches parks and recreational areas, and 20% stretches residential areas. The flights were made possible by Everdrone’s flight system. The drone itself is a standard off the shelf product. Equipped with software and sensor technology developed by Everdrone it gets the necessary capabilities for autonomous BVLOS operations (beyond visual line of sight). Among other things, the system includes the following features:
-
Multi-stereo camera technology for 360° sense and avoid.
-
Visual positioning through optical flow (aka visual odometry) allowing for safe manoeuvring in GPS denied areas.
-
Vision-based landing system for precision landing on ground markers.
-
Onboard ADS-B receiver for detection and avoidance of manned aircraft.
-
Comprehensive self-diagnostics and fail-safe capabilities using both internal and external data sources.
-
Telemetry connection via the mobile network (3G/4G).
-
Onboard and remote black box.
For more information on Everdrone’s technology, get in touch via info@everdrone.com.
The flights performed were fully autonomous, from take-off all the way to the landing that was carried out in a courtyard surrounded by tall buildings.
“A function that is particularly important for missions in urban environments is the ability to carry out extremely high-precision landings in places where GPS reception is not reliable. The landing spot used in this scenario is surrounded by buildings. In such an environment you cannot rely on traditional GPS positioning, it simply isn’t safe enough“, says Maciek Drejak, CTO at Everdrone. “Instead, we have developed a vision-based system that is able to ensure the distance to surrounding obstacles, and also to steer the drone towards a specially-designed landing marker on the ground.”
The demonstration program included 8 missions in total and was carried out in Gothenburg, Sweden, between July 9th and 13th 2019. All flights were completed according to plan with all systems operating as expected.


